Nu ruim 100 meter afgelegd en is het eindelijk tijd om de robotarm uit te testen. De arm is een erg belangrijk onderdeel van Curiosity. Er zit namelijk niet alleen een aantal instrumenten op, maar ook de boor en de schep. Die zijn nodig om grond- en steenmonsters in de twee belangrijkste instrumenten op de rover te krijgen. Dus als die arm het niet doet, zijn we mooi in de aap gelogeerd.
Over die twee instrumenten meer in een volgende blog. Nu eerst een uitleg van de werking van de arm. Het interessantste aan de arm is de kop; die vol zit met allerlei leuke snufjes. Deze snufjes worden een voor een ingezet als de camera’s en de laser een interessante rots hebben gevonden of een zandmonster hebben genomen. De kop kan namelijk tegen de rots of het zand aangezet worden en dat vervolgens onderzoeken. Als blijkt dat het heel erg interessant is, wordt vervolgens de boor ingezet of het zand opgeschept.
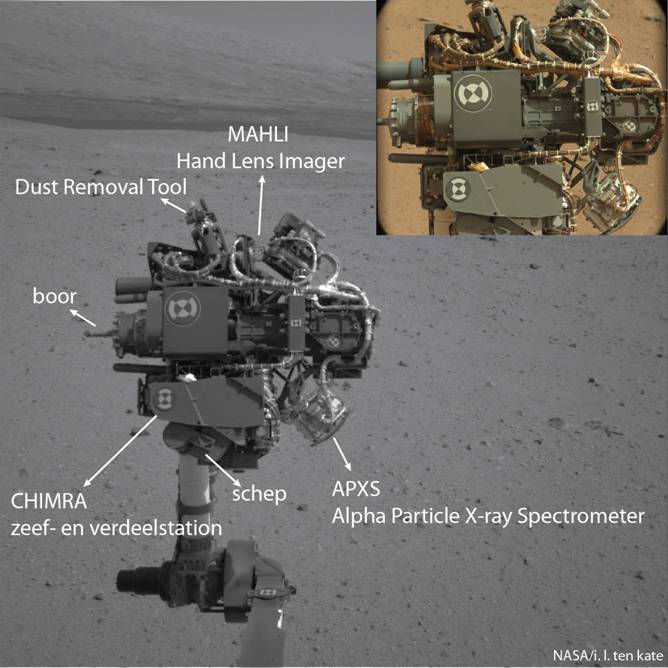
De gebruiksaanwijzing van de arm
1) Afstoffen
Rots en steen worden eerst stofvrij gemaakt, zodat de steen goed zichtbaar is. Dit gebeurt met de Dust Removal Tool, twee borsteltjes van metaaldraad. Met zand hoeft dit natuurlijk niet, anders ben je al het zand kwijt. Rechts op de kop zijn de borsteltjes te zien.

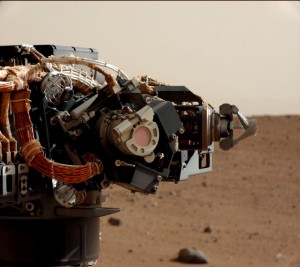
2) Foto maken
Dan wordt er met MAHLI een foto gemaakt. MAHLI is een 2 megapixel camera (1600×1200 pixels) die met een resolutie tot 15 micrometer per pixel zeer gedetailleerde foto’s kan maken. Als MAHLI niet aan het werk hoeft, wordt hij beschermd door een stofkap, het roze klepje op de foto hieronder. Dit is de eerste scherpe foto van MAHLI. Nog niet heel gedetailleerd, want gemaakt vanaf 1,5 meter afstand. MAHLI kan scherpe foto’s maken vanaf ongeveer 2 centimeter, dus dat belooft mooie detailfoto’s.
3) Chemische samenstelling meten
Daarna wordt met APXS de chemische samenstelling van de steen bepaald. De laser heeft al een globale inschatting van de elementen gemaakt. APXS kan dat echter veel nauwkeuriger. Het principe van de instrumenten is min of meer hetzelfde: het instrument schiet straling op de rots, wat een lichtflits veroorzaakt. Deze lichtflits wordt gemeten met een spectrometer. De straling van APXS komt alleen niet van een laser, maar van een radioactieve bron (curium) die hele korte, niet zichtbare, golven uitzendt (röntgen en alfadeeltjes). De uitgezonden lichtflits valt in hetzelfde golflengtegebied en is daarom niet zichtbaar voor ons.
4) Boren of scheppen
Is de rots interessant genoeg, dan wordt er met de boor poeder uitgeboord. De boor kan tot een diepte van maximaal 5 centimeter komen. Het poeder dat hierbij vrijkomt, wordt door de sleuven van de boorkop naar een container bovenin de boor getransporteerd. Mocht de boor vast komen te zitten, dan kan de kop losgekoppeld worden van de arm en wordt er een nieuwe boorkop gebruikt.
5) Schudden, zeven en verdelen
Het verzamelde zand of de verpulverde steen worden vervolgens via een buisje de CHIMRA ingeschud. Dit schudden gebeurt door de robotarm te bewegen en de boor en CHIMRA zelf te laten trillen. CHIMRA is het zeef- verdeelstation. Door hetzelfde schudsysteem wordt hierin het zand en de poeder gezeefd en verdeeld in kleine porties. Die porties worden vervolgens in een van de twee analytisch systemen op de rover gegoten.
Inmiddels heeft in ieder geval MAHLI dus bewezen prima te werken. Hopelijk deze week meer goed nieuws over de andere onderdelen.
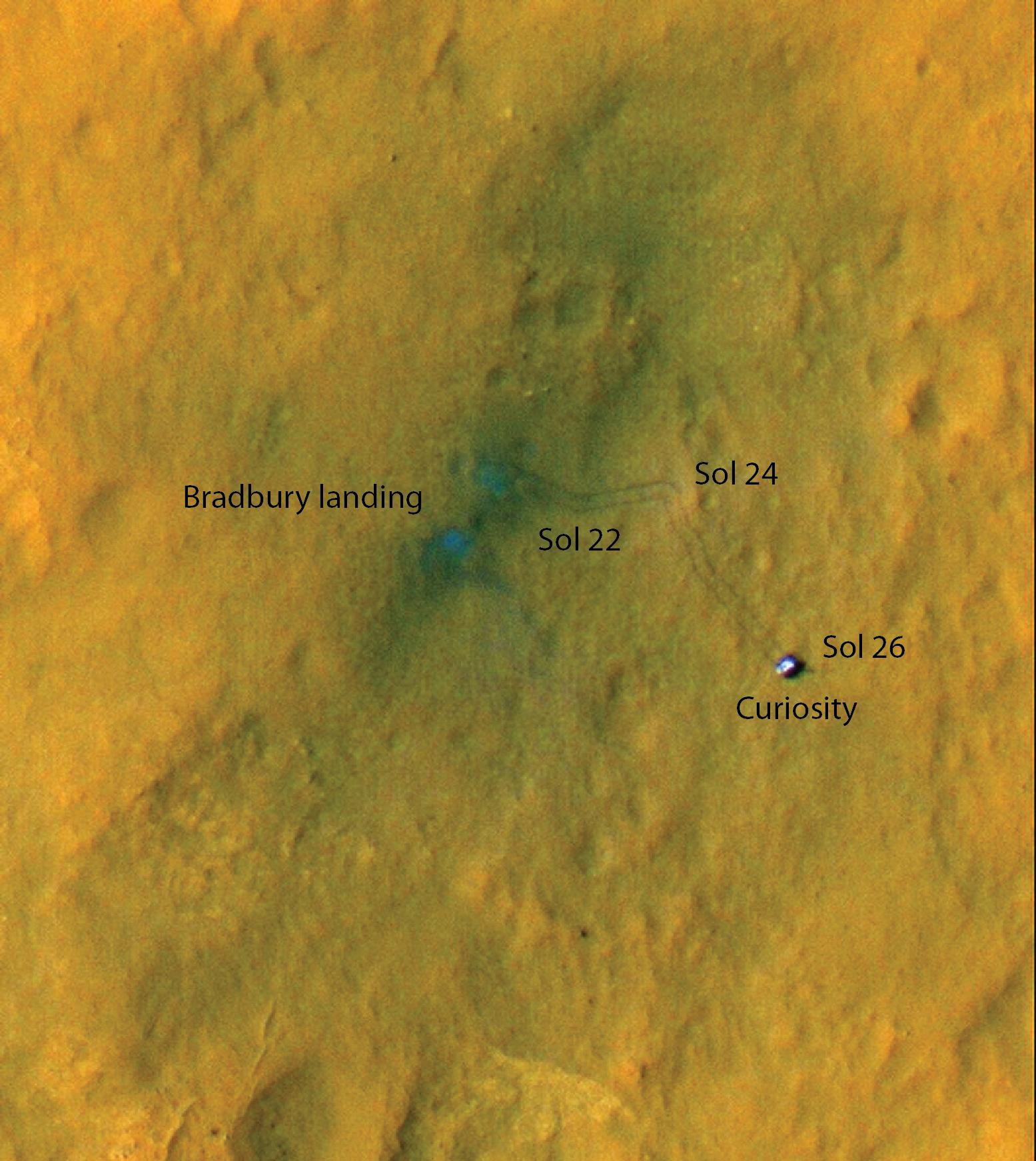
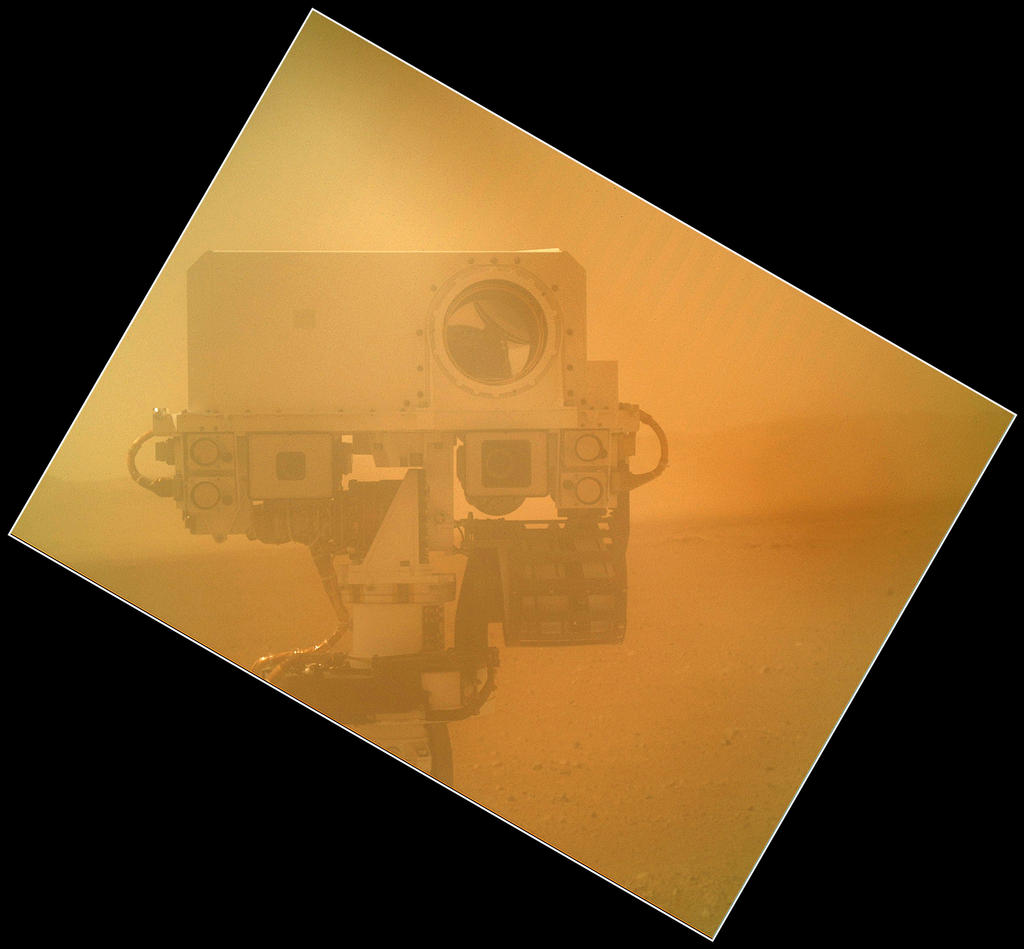
Plaatjes van de week
Dit vond ik de mooiste foto’s van deze week:
Inge Loes ten Kate is onderzoekster aan de Universiteit van Utrecht en is sinds zes jaar betrokken bij de ontwikkeling van de Marsverkenner Curiosity. Zij houdt voor de NOS een blog bij over de verkenningstocht van de Marswagen.
Bron: NOS